Automatisk, intelligent rengøring af stalde
Teknologisk Institut har udviklet et vision-system, der kan gøre automatisk robotrengøring af stalde til en miljø- og medarbejdervenlig realitet. Systemet skal guide rengøringsrobotter rundt i danske stalde for at rengøre selektivt og effektivt.
Hygiejnekravene til danske staldmiljøer bliver mere og mere krævende. Dette betyder, at rengøring og desinfektion skal udføres bedre og oftere. Rengøring af svinestier og kyllingefarme er særdeles barskt og beskidt arbejde, og det bliver stadigt sværere at finde kompetent arbejdskræft, der er villig til at udføre den opgave.
Automatiseret rengøring med robotter er derfor en oplagt løsning, fordi det både letter den enkelte gårdarbejder fra det beskidte job og samtidigt sparer på ressourcerne ved at udføre selektiv, segmenteret rengøring med overmenneskelig præcision. For at automatiseret robotrengøring kan blive en effektiv realitet, har Teknologisk Institut udviklet en vision-komponent, der kan forsyne en robot med strukturel og dynamisk information om, hvor ren eksempelvis en grisesti er, samt hvilke områder, der eventuelt trænger til yderligere rengøring.
Selektiv rengøring
Med denne information til rådighed vil systemet være i stand til selv at bestemme den optimale rengøringsprocedure. Derved undgås unødvendigt spild af vand, hvilket også vil føre til udgiftsreduktioner i det samlede budget som følge af reduceret ressourceforbrug.
En typisk gård benytter 2.000 timer på rengøring om året. Det skønnes at der kan spares 2/3 af disse med en effektiv rengøringsrobot. Denne besparelse løber op i 235.000 kr. om året alene i lønomkostninger. Ydermere er der undersøgelser, der tyder på, at arbejdere, som manuelt udfører rengøringsarbejdet lider af vejrtrækningsproblemer.
Nuværende automatiske rengøringsmaskiner arbejder efter fastsatte skemaer for, hvordan de skal gøre rent og hvor længe. Her modtager maskinen altså ikke nogen form for feedback. Samtidig ved man, at vandforbruget typisk stiger eksponentielt proportionelt til graden af renhed. Og det er derfor ikke omkostningseffektivt at rengøre mere end 60 til 85 procent. Resten rengøres manuelt. Efter den automatiske rengøring er nogle stier næsten rene, alt imens andre kan være meget beskidte. Selektiv rengøring vil altså være en stor optimering.
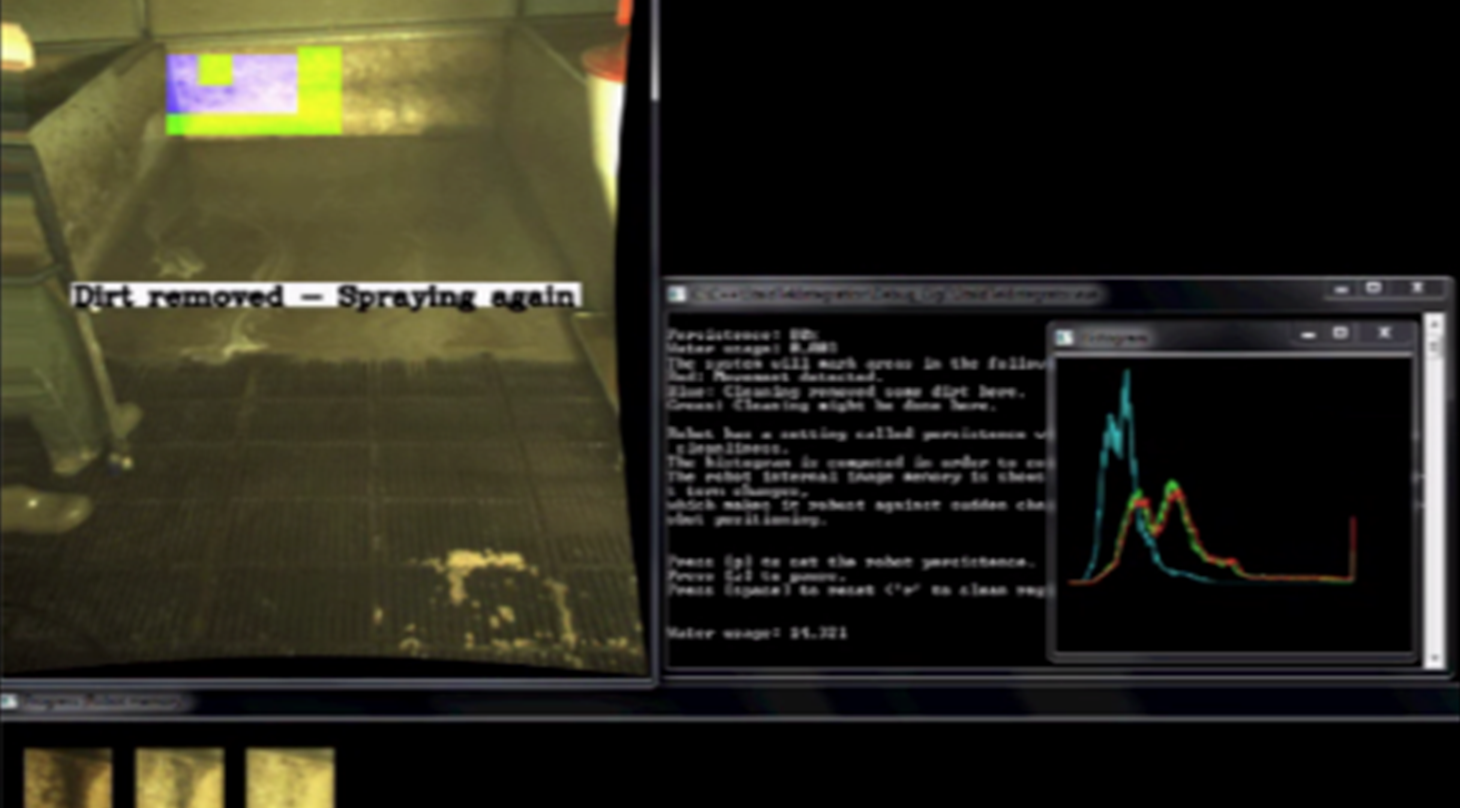
Vision-systemet kan indstilles med varierende følsomhed for detektion af skidt.
Enhver form for rengøring
Et velfungerende rengøringssystem må nødvendigvis være i stand til at håndtere meget forskellige rengøringsscenarier. Og algoritmen bag systemet er derfor designet på en fleksibel måde, så den kan blive tilpasset til enhver form for rengøring. Der skal blot være en ændring, fra før rengøringen til efter rengøringen, som kamerasystemet kan registrere. Denne forskel behøver dog ikke at være specielt tydelig, og det fungerer også selvom der er damp i luften, hvis dampen og den rene overflade ikke ser identisk ud.
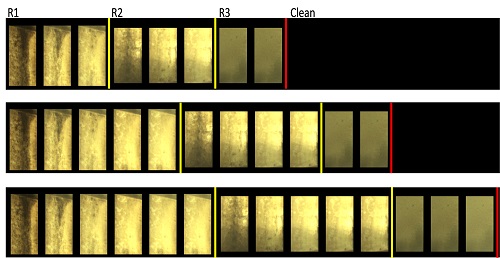
Lyset i en stald er ikke ensformig og alle overflader har forskellige farveegenskaber. Robotten bruger derfor vision-systemet til at placere sig rigtigt foran grisestien. Baseret på modellen segmenterer den overfladerne og fokuserer rengøringen på et bestemt udvalgt område af gangen. Den rengør og sporer ændringer gentagne gange indtil der ikke længere registreres nogen ændringer baseret på parameteren vedholdenhed. For at undgå fejlklassificering på grund af rindende vand og damp anvendes der en "vent"-funktion, der bruger betingelser, som måler dynamikken i omgivelserne.
”Segmenteringen af overfladerne gør robotten i stand til at målrette sig og fokusere på de vægge og gitre, der er vanskelige at rengøre. Derudover ville den dynamiske strategi ved hjælp af farver og tidsmæssige ændringer yderligere muliggøre intelligent rengøring med velvalgte ophørskriterier,” forklarer Michael Nielsen, vision-ekspert hos Teknologisk Institut.
Anvendelse
Det foreslåede vision-komponent kan anvendes til et automatisk rengøringssystem inden for husdyrbesætninger, transport eller andre former for rengøring, hvor ændringer fra beskidt til rent er synligt for kameraudstyr. Fremtidig arbejde skulle også bestræbe sig på at undersøge muligheder for at registrere biofilm.
Nuværende arbejde udvider anvendelsen til kyllingeproducenter, og data herom er anskaffet. Det kan også fungere som komponent i et større ICT-system, der overvåger og optimerer forholdet i en husdyrbesætning, og som leverer et interface til rapportering af situationen til bestyreren.
Innovationskonsortiet StaldTek
StaldTek er et innovationskonsortium støttet af Ministeriet for Forskning, Innovation og Videregående Uddannelse. I perioden 2009-2013 har Teknologisk Institut, gennem StaldTek, arbejdet målrettet med forskning, udvikling og anvendelse af teknologiske muligheder for automatisering af arbejdsprocedurer, der har indflydelse på omkostningstunge aspekter af dansk svineproduktionen.
StaldTek har haft til formål at introducere nye former for svinestalde, hvor produktivitet, miljøbelastning, arbejdsmiljø og dyrevelfærd er optimerede. Stalde, hvor bygninger, inventar og udstyr samt interaktionen med mennesker og dyr bygger på integrationen af avancerede og kognitivt rettede sensor- og robotteknologier.
Dette projekt blev udviklet under Innovationskonsortiet StaldTek støttet af Styrelsen for Forskning og Innovation. Tak til Lars H. J. Hansen for at låne os hans grisestald. Algoritmerne er udviklet af Michael Nielsen. Projektet blev ledet af Kurt Nielsen.