'Tyggegummirobot' rydder op på fortovet
11. januar 2023
Der er et stort potentiale for robotter til mange af de ensformige, tidskrævende - og for de fleste usynlige - inspektions- og vedligeholdsopgaver, som sikrer samfundets infrastruktur. Capra Robotics og Gumbusters har med sparring fra Teknologisk Institut og støtte fra EU løst en af disse opgaver med en tyggegummifjerner-robot.
Har du nogensinde kigget ned og set, hvor mange tyggegummirester, der er klistret til fortovet på din slentretur gennem byen?
Hvis ikke, så skulle du prøve det næste gang, du er ude at gå.
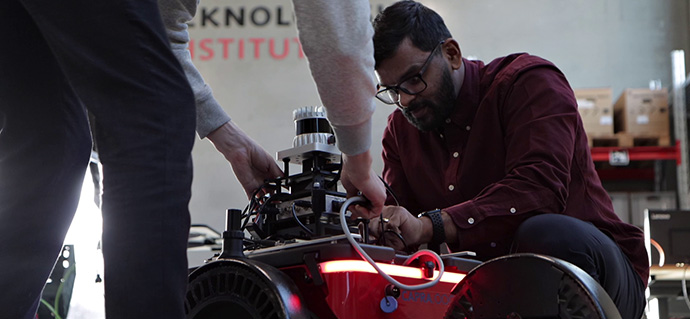
Netop tyggegummiresterne på fortovet har den aarhusianske robotvirksomhed Capra Robotics kastet sig over i samarbejde med virksomheden Gumbusters. Det er der kommet en prototype af en tyggegummifjerner-robot ved navn Chewy ud af.
− Der bliver spyttet 75 millioner stykker tyggegummi ud på fortovet om året i Danmark, og der ligger over 400 millioner allerede. Det er simpelthen ikke noget, som mennesker skal samle op for andre. Men så kan vi sætte robotter til at gøre det, fortæller Mads Bendt, der er Founder og Chief Innovation Officer hos Capra Robotics.

− Vi har udviklet en tyggegummifjerner-robot. Robotten fungerer på den måde, at den kører på et fortov, hvor den har et kamera på med kunstig intelligens, som gør, at vi kan se, hvor tyggegummiet er. Robotten kører så hen til tyggegummiet og placerer et skrubbehoved over det. Så opvarmer den en opløsningsvæske lavet af Gumbusters, som er biologisk nedbrydelig, sprøjter den på, og så skrubber den. Til sidst er der en lille støvsuger, som suger resten op, tilføjer Mads Bendt.
Capra Robotics laver udendørs mobile robotplatforme, der kan bruges til mange forskellige ting – og nu kan den så også bruges til at fjerne tyggegummi fra fortovet.
Robotløsningen er blevet til gennem det EU-finansierede projekt RIMA (Robotics for Infrastructure Inspection and Maintenance), som hjælper små- og mellemstore virksomheder med at indføre robotteknologi til at løse udfordringer inden for inspektion og vedligehold. Teknologisk Institut har ledet den danske indsats i projektet, og har derfor hjulpet Capra Robotics og Gumbusters med sparring undervejs.
− Vi er en virksomhed med 30 ansatte, og vi kan ikke nå alt. Så hvis vi for eksempel skal ud at kigge på sensorer, så er det godt at have en god teknisk hjælp fra Teknologisk Institut, fortæller Mads Bendt.
Kongen af fortovet
Det er ikke kun, når det gælder opsamling af tyggegummi fra vores fortov og natur, at der kan være brug for hjælp fra robotterne. Capra Robotics og Mads Bendt er nemlig i fuld gang med at udforske andre opgaver, som robotterne kan hjælpe med på de danske fortove.
− Jeg vil gerne være kongen af fortovet. Det lyder lidt fjollet, men det er dér, mit fokus er. Alt, hvad der har med fortovet at gøre, det vil jeg gerne kigge på. Om der er tale om tyggegummi, cigaretskodder, ukrudt eller fliser, der ligger forkert, fortæller Mads Bendt.
Og robotteknologiens formåen rækker ikke kun til fortovet. Der er nemlig også et stort potentiale for robotter, når det kommer til opgaver inden for inspektion og vedligehold, lyder det fra specialist ved Teknologisk Institut Jeshith Damsbo Anandasubramaniam.
− Mennesker udfører i dag et hav af ensformige, tidskrævende og nogle gange risikable opgaver, når infrastruktur som veje, broer og vandforsyning skal inspiceres og vedligeholdes. Vi arbejder på at få danske virksomheder til at realisere og udnytte potentialet i at lade robotter aflaste ved nogle af de opgaver, siger han.
Robotter til vedligehold af vindmøller, vandløb og veje
Udviklingen af en robot til at fjerne tyggegummi er nemlig ikke det eneste danske eksperiment i RIMA. Teknologisk Institut har gennem det fireårige projekt hjulpet flere andre virksomheder med nøgleservices til at opnå acceleration. Det inkluderer støtte til tests og teknologioverførsel, rådgivning og træning i robotteknologi inden for inspektion og vedligehold.
Få her et overblik over eksperimenterne på dansk jord:
"FIDR" med Lorenz Technology + Capra Robotics
En intelligent løsning, der bruger robotter til hegnsinspektion for at optimere sikkerhed under al slags vejr
"RAHIP" med Brainbotics + RanMarine
Robotopsamling af tang og alger ved strande og søer
"AUPIR" med Blue Atlas Robotics
Nemmere og mere effektiv udførelse af inspektionsopgaver under vandets overflade med en undervandsdrone
"BladeBUG" med BladeBUG + EGGS Design
Robot til reducering af kompleksitet og risiko ved vedligeholdelse af havvindmøller
"CAARMS" med Desupervised + Robotiz3d Ltd.
AI-drevet robotsystem til at lokalisere og reparere revner og huller i veje
"GUMBOT" med Capra Robotics + Gumbusters
Robot til lokalisering og fjernelse af tyggegummier på fortove
Hvad er RIMA?
RIMA (Robotics for Infrastructure Inspection and Maintenance) er et fireårigt, europæisk projekt (2019-2023), som hjælper små- og mellemstore virksomheder med at indføre robotteknologi til at løse udfordringer inden for inspektion og vedligehold - eksempelvis vandforsyning, veje, jernbaner, infrastruktur i byer og energiproduktion og -distribution.
RIMA-konsortiet består af 16 ledende forskningsorganisationer fra forskellige europæiske lande og syv organisationer, som repræsenterer slutbrugere og forskellige sektorer. RIMA er blevet finansieret med 120 millioner kroner af EU.