Robotinnovationens maskinrum: Mobile robotter, der både trives i tørvejr og terræn
7. januar 2020
Teknologier, sensorer og software kan gøre det muligt at forene indendørs mobile robotter med udendørs mobile robotter. Hør hvordan i ovenstående video.
Mobile robotter har i dag ret veldefinerede arbejdsområder. Enten er det en indendørsrobot, som kan køre på flade gulve og er beskyttet fra vind og vejr. Ellers er det en udendørsrobot, som kan køre på ujævnt terræn, navigere efter GPS og ikke er bange for en lille regnbyge.
Men det er sjældent, at en mobil robot faktisk har mulighed for både at bevæge sig indenfor og udenfor, eller krydse et lille udendørsområde imellem to bygninger.
Det skyldes dels den mekaniske konstruktion og fysiske egenskaber ved robotten, men også de teknologier, som de mobile robotter bruger, når de skal finde ud af, hvor de befinder sig (lokalisering) og hvordan de kommer fra A til B (navigation).
‒ Det her grænsefelt mellem inde og ude har nogle andre udfordringer, end man er vant til, siger konsulent hos Teknologisk Institut Kasper Camillus Jeppesen.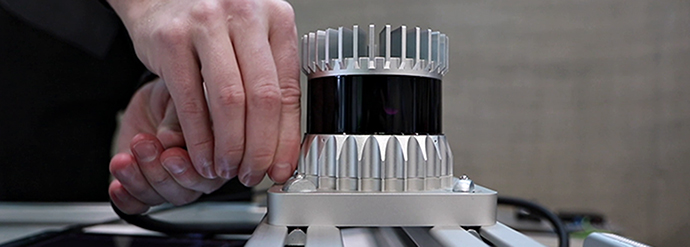
En roterende lasertommestok
Teknologisk Institut har kigget på, hvordan man kan forene indendørs og udendørs mobile robotter ved at anvende særlige teknologier – heriblandt en laserscanner, der fungerer som en slags roterende lasertommestok.
‒ På robotten har vi sat en 3D-lidar, som måler afstanden til alt omkring robotten. Den fungerer ved, at den udsender laserlys i en bølgelængde i det infrarøde område, og så måler den på, hvor lang tid det tager for lyset at returnere til laserscanneren – og på den måde kan den udregne, hvor langt væk alting er, siger Kasper Camillus Jeppesen.
‒ I modsætning til en normal laserscanner, så har den her laserscanner rigtig mange lag. Det vil sige, at den kan både se ned på jorden, men også ret højt op i luften. Så vi får en rigtig god idé om, hvordan omgivelserne ser ud, siger han, og tilføjer, at netop den type laserscanner også bliver brugt til selvkørende biler.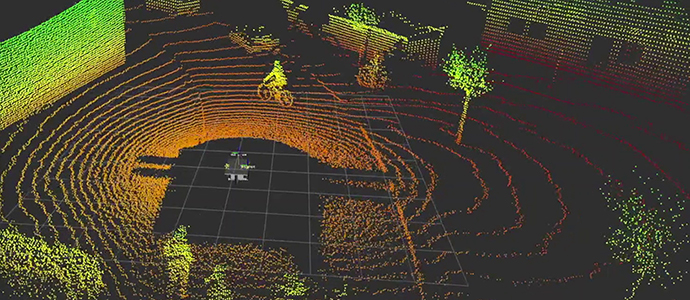
Fremtidens udendørs mobile robotter skal være sikre
På fronten af robotten er der placeret to kameraer, og for at positionere robotten er den monteret med GPS-antenner, der snakker med et GPS-basesystem.
‒ Når vi kommer udenfor, er der mange flere udfordringer at tage højde for: Der er ujævnt terræn, forskellige vejrforhold, mange flere forhindringer og meget højere afstand til ting omkring robotten. Derfor tester vi den her type teknologi i udendørs omgivelser med de nyeste sensorer for at sikre, at fremtidige mobile robotter til udendørs brug bliver sikre, siger Kasper Camillus Jeppesen.
‒ De teknologier, man ser på den her robot, har potentiale inden for 3D-rekonstruktion og kortlægning, uddyber han.
Udviklingen er støttet af Styrelsen for Institutioner og Uddannelsesstøtte under Uddannelses- og Forskningsministeriet.