Coop undersøger robotternes grænser hos Teknologisk Institut
28. februar 2018
Coop ønsker at automatisere tunge, manuelle arbejdsopgaver på deres varelagre. De har derfor kontaktet Teknologisk Institut, som i deres robotlaboratorium har undersøgt, om en robot kan gribe lagrenes store varians af varer.
Dåsetomater, appelsinsodavand og gule bønner. Coop pakker hver dag over 10.000 forskellige slags dagligvarer manuelt fra deres lagre, inden de ryger ud til butikkerne.
Teknologisk Institut har derfor undersøgt, om det er muligt at få en robot til at genkende og gribe en sådan høj varians af varer.
‒ Udfordringen er, at der findes ekstremt mange forskellige varer, der skal pakkes på mixpaller og sendes ud til de enkelte butikker, siger seniorspecialist Martin Mølbach Olsen fra Teknologisk Institut.
‒ Men de her varer vejer op til 12-15 kilo, og selve plukningen og pakningen af de enkelte varer sker manuelt hos Coop. Så det har været et spørgsmål om at få automatiseret den proces, tilføjer han.
Af den årsag har Coop arbejdet sammen med Teknologisk Institut om et for-projekt, som skal afklare, om det er muligt for en robot at genkende og gribe så mange forskellige emner.
‒ Vi har valgt at bruge penge på det her for-projekt, fordi vi på sigt gerne vil have en mobil robot, der selv kan bevæge sig hen og tage varerne, i stedet for at varerne skal bringes hen til robotten, siger Christian Flindt, der er teknisk chef hos Coop.
Men før man kunne kigge på at gøre robotten mobil, var man nødt til at undersøge, om man overhovedet kunne udvikle en teknologi, så robotten kan genkende varerne og derefter gribe dem, fortæller Martin Mølbach Olsen.
Hos Teknologisk Institut har man derfor undersøgt, hvilke vision-løsninger der kan bruges til at adskille og genkende emnerne. Med en avanceret 3D-sensor kan man måle sig frem til de præcise plukkepositioner ved hjælp af 100.000 afstandsmålinger per billede.
Derudover har Teknologisk Institut brugt en helt ny type griber, der er så fleksibel, at den kan plukke og aflevere en lang række af de varer i 10-15 kilo-klassen, som Coop i dag håndterer manuelt.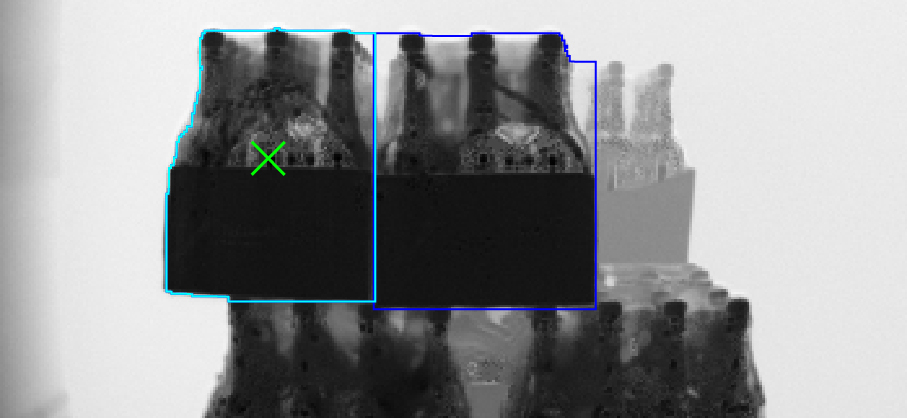
Efter samarbejdets afslutning er Coop, ifølge Christian Flindt, blevet klogere på, hvad der skal til for at kunne lykkes med projektet.
‒ Vi er overraskede over, at det, vi troede, var nemmest at gribe med robotten, faktisk var det sværeste. Vi havde forestillet os, at almindelige kasser ville være de nemmeste at gribe, men det var faktisk dåser, glas og cylindere, siger han.
Martin Mølbach Olsen tilføjer, at projektet har vist, at robotten kan håndtere mange forskellige varer.
‒ Vi tror på, at der findes løsninger for resten af udfordringerne. Man kan nok ikke udvikle en griber, der passer til alle varer, men i stedet kan man have forskellige robotter, der kører rundt og tager de emner, de kan tage, afslutter han.
I ovenstående video kan du se resultatet af for-projektet – en robot udstyret med en 3D-sensor og ny, særlig griber, som er i stand til at plukke og pakke en høj varians af varer.