Fra digital robotsimulering til virkelighed hos støberimaskinproducenten DISA
6. november 2017
280 ekstra støbeemner i timen. Det er gevinsten, som støberimaskinproducenten DISA eksempelvis kan levere til deres kunder, takket være en ny robotløsning udviklet i samarbejde med Teknologisk Institut.
Inden det over 1.500 grader varme smeltejern flyder ned i støbeforme og bliver til alt lige fra kloakdæksler til kakkelovne, så skal det igennem et filter for at fjerne urenheder.
Det filter ‒ der før blev placeret manuelt hver syvende sekund ‒ bliver nu indsat af en robot.
‒ Og det gør den så hurtigt, at vi kan køre 70 ekstra forme i timen. Hvis du regner det om, så sidder der i nogle forme fire støbeemner. Dem får du så fire gange 70 af. Så vores slutkunder får mere performance ud af maskinen, siger projektleder Carsten Hansen fra DISA.
Digital tvilling giver pote
Teknologisk Institut har først designet robotløsningen i et digitalt simuleringsunivers, hvor man kan optimere og teste, at robotten ikke rammer noget.
Det har været værdifuldt for automationsprocessen.
‒ Det er meget dyrt sent i forløbet at skulle lave om i konstruktionen. Nogle dele er støbt og nogle dele har lang lead-time. Så det skal vi helst fange "up front". Dér har Teknologisk Institut jo kunnet simulere det for os inden, så vi faktisk ikke har haft nogle dele, der skulle laves om under forløbet, understreger Carsten Hansen.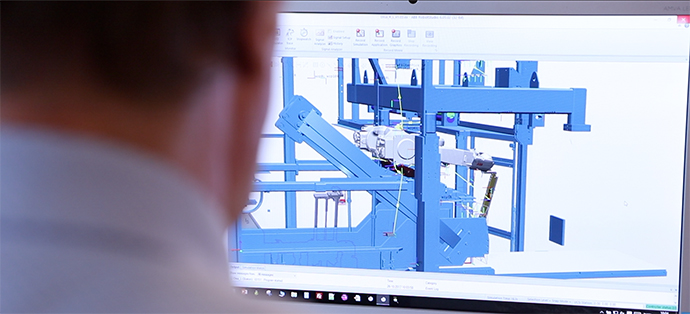
Den virtuelle udgave af et anlæg ‒ også kaldt for en digital tvilling ‒ giver mulighed for at simulere en ny produktion langt lettere og billigere end en fysisk opstilling.
I forhold til eksisterende produktionslinjer kan virtuel produktion finde fejl og mangler, og man kan straks se konsekvenserne af eventuelle ændringer.
Inden implementering kan man derfor være sikker på, at robotten og anlægsdesignet passer til opgaven. På den måde minimeres risici for dyre fejlprojekteringer markant.
Vil du også gerne minimere risici for dyre fejlprojekteringer? Så læs mere om, hvordan Teknologisk Institut kan hjælpe dig med robotsimulering her.