Fremtidens slagteri
AP 5 - Den lille hjælper
Artikel:
Grothe, NH. (2021) Slagteriets akademiske overbygning. Krogen februar
Formål
Projektet har til formål at udvikle en fleksibel robotplatform, der kan gøre robotteknologi lettere tilgængelig for medarbejderen på gulvet således, at et synergisk samarbejde kan opstå til gavn for medarbejderen og industrien. I denne arbejdspakke udvikles en mobil robotplatform, der nemt kan flyttes mellem forskellige, midlertidige opgaver på slagteriet.
Projektstatus 4. kvartal 2020
Det vigtigste nye output er, at der sammen med branchen er taget initiativ til muligheden for at afprøve funktionalitet og potentiale for den mobile kollaborative robotplatform. Med dette tiltag får den nye teknologi gode muligheder for at blive modnet i sin funktionsform og gøre sig yderligere attraktiv for branchen. |
Den næste store aktivitet er at dokumentere konceptets potentiale og derved skærpe interessen fra kødindustrien. Efterfølgende kan en teknologipartner involveres mhp. at videreudvikle en industriel prototype og senere en 0-serie af Den Lille Hjælper. |
Projektstatus 3. kvartal 2020
Det vigtigste nye output er, at en aftale med et værtslagteri for en prototype installation er på plads, og at dialog med potentielle kommercielle partnere er positive. Den kollaborative funktionsmodel med et visionsystem, som intelligent identificerer de meget forskelligartede kødprodukter, er lykkedes med gode resultater. Konceptet består af en fast monteret docking station i gulvet fx under et bord eller transportbånd og den mobile robotplatform, som er bestykket med visionkamera, kontrolsystem samt vision-computerkraft. Når disse fysiske elementer er på plads, mangler installationen kun at blive trænet i at identificere og håndtere de ønskede produkter for den specifikke arbejdsplads. Træningen består i en oplæring via billedopsamling, der efterfølgende er behandlet af specialudviklede dataalgoritmer. Konceptet med mobilitet og fleksibilitet er efterprøvet og vurderet realistisk anvendeligt i produktionsmiljøet. Der er tilmed rettet henvendelse fra industrien om muligheden for faste kollaborative robotinstallationer med intelligent vision. |
Den næste store aktivitet er, at et samarbejde mellem værtslagteriet, en kommerciel partner og DMRI skal forhandles og aftales. |
Projektstatus 2. kvartal 2020
Det vigtigste nye output er, at fremstillingen af funktionsmodellen og valideringstesten er fuldført med gode resultater. I casen ”Ruller lægges i hvidvogn” har vi opnået en kapacitet på 478 takter pr. time (målet var 400). Casen ”Ruller ud af net-kanon” viste ligeledes god kapacitet - op til 900 takter pr. time (målet var 700) - dog afhængig af timing ved den manuelle indfødning af ruller. Det skal bemærkes, at denne case ”kun” aflaster personalet ved at udføre den fysisk belastende bevægelse, og at en person fortsat skal indføde ruller. Her har vi foreslået, at automatisk indfødning og evt. sammenbinding med forudgående proces undersøges. Konceptet med mobilitet og fleksibilitet er efterprøvet og vurderet realistisk anvendeligt i produktionsmiljøet. Porteføljestyregruppen har accepteret arbejdspakkens faseovergang til prototype. |
| Arbejdspakken afsluttes nu i SAF regi og overgår til produktmodning og implementering i et kommercielt samarbejde mellem sektoren og en integrator. Her forventer vi, at en prototype fremstilles og forberedes til 2-3 forskellige opgaver på et slagteri i Danmark for sluttelig at blive et kommercielt tilgængeligt produkt. |

Projektstatus 1. kvartal 2020
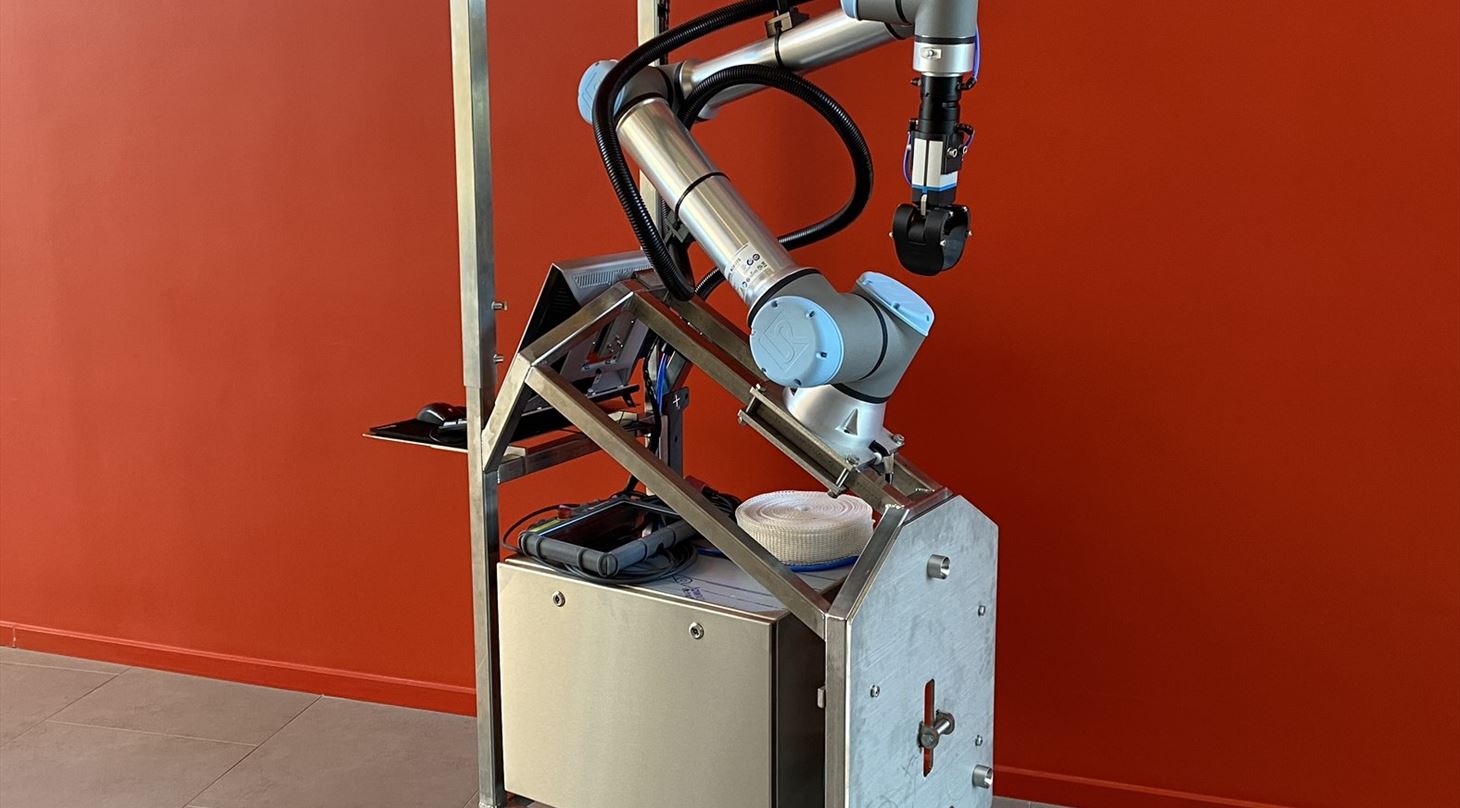
Ved årets første styregruppemøde fik projektet bevilget faseovergang til funktionsmodelfasen. Herefter er der arbejdet med vision "deep learning" og styringsintegration med den nyindkøbte UR10e kollaborative robotarm. Parallelt med styringsdelen er der designet og fremstillet en handy og meget mobil platform. Under nuværende udarbejdelse er: - Et koncept, som nemt kan fastholde platformen, mens robotten udfører arbejdsopgaver. Platformen skal være mobil og hurtig at flytte fra opgave til opgave, samtidigt med at den lette konstruktion er fastlåst i en stabil position. Dette koncept kaldes en "Dokning station". - Et kamerahus, som beskytter visionkameraerne mod kulde og rengøringsaktiviteter. Visionkameraet er en essentiel del af systemet, som billedligt talt giver robotten øjne - derfor er det ekstremt vigtigt, at kameraet er funktionsdygtigt til enhver tid. - Specielle gribesystemer, som tilgodeser sikkerhedsaspekter overfor slagterimedarbejderen, samtidigt med at funktionen skal være velfungerende. Griberkomponenten for enden af robotarmen er meget vigtig funktionsmæssigt, men også den del af den kollaborative robot, som mest sandsynligt kan komme i nærkontakt med medarbejderen med risiko for klemmeskader for medarbejderen. Resultatmæssigt har teamet udviklet: - En velfungerende integration mellem vision-applikationen og robot-kontrolsystemet. Visionsystemet kan identificere slagteprodukter, som ligger vilkårligt på et bord med et centerpunkt og længderetning. Disse data overføres til robotkontrolsystemet, som dirigerer robotarmen til position for opsamling. Samtidigt ser et andet visionskamera afleveringspositionen i en transportvogn. På samme måde får robotten information til at aflevere slagteproduktet i vognen. - En ny platform, som er blevet godt modtaget af interessentgruppen på slagteriet. Det nye design er mobilt som et traditionelt rullebord, så det nemt kan komme rundt på slagteriernes ofte begrænsede pladsforhold. Målet for 2020 bliver en funktionsdygtig mobil robotplatform, som kan udføre håndtering af flæskeruller i området for net-påføring, i produktionslokaliteten eller i en lignede pilotopstilling. |
Projektet før 2020
Projektet er opdelt i fire arbejdspakker - WP1->WP3 findes her
WP4: Adaptiv robotstyring
Projektet har til formål at udvikle en fleksibel robotplatform, der kan gøre robotteknologi lettere tilgængelig for medarbejderen på gulvet således, at et synergisk samarbejde kan opstå til gavn for medarbejderen og industrien
Konferencebidrag - Artikel:
2018
Philipsen, MP., Wu, H., Moeslund, TB.(2018) Virtual reality for demonstrating tool pose. IROS - automating robot experiments 5th october
Philipsen, MP., Moeslund, TB. (2018) Self-supervised preparation for supervised pose prediction. 7th Aalborg U robotics workshop
Philipsen, MP., Rehm, M., Moeslund, TB. (2018) Industrial human-robot collaboration. AI- MHRI (FAIM), Stockholm 13.-19.July
2017
Philipsen, M., Andersen, RS., Madsen, O., Moeslund, TB. (2017) Adaptive and self-learning slaughter robots. 6th Aalborg U Robotics workshop