
Midterstykkerobotter - AP 1 Afskæring af hel ribbensplade
AP 1 Afskæring af hel ribbensplade
Formål
Projektet har til formål at udvikle ny produktionsteknologi, der kan automatisere enkeltfunktioner på de eksisterende linjer i den danske svinesektor, som i dag er manuelle. Dette sker gennem systematisk anvendelse af den nyeste robotteknologi og intelligent styringsteknologi. Arbejdspakken har til formål at udvikle en løsning, hvor en robotcelle i produktionstempoet bliver i stand til at afskære hele ribbenspladen, således, at der afsættes et forudbestemt kødlag på kambenene, og de øvrige områder bliver skåret tæt på benene.
Projektstatus 4. kvartal 2020
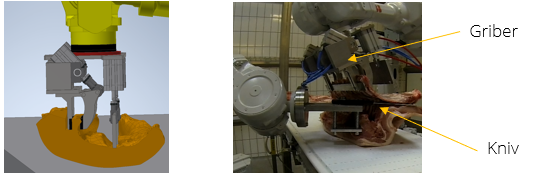
Det vigtigste nye output er, at projektet har afklaret de mange aspekter, der ligger i en proces, hvor der er stor anatomisk variation, og hvor det har vist sig at være meget vanskeligt automatisk at gribe/fiksere et midterstykke/benplade for at udføre automatiske operationer. Som et alternativt output er der udviklet et hjælpeværktøj i form af en faconformet 2-håndskniv, som kan skære kambenene med et ensartet kødlag. For at optimere på proces og ergonomiske forhold er der videreudviklet en ”Aktiv” faconkniv, som er udstyret med en oscillerende aktuator, som hjælper operatøren med at udføre selve skærebevægelsen. Derved er det muligt at udføre operationen både skubbende og trækkende, alt efter orientering på transportbåndet. Hjælpeværktøjet vurderes i højere grad at kunne levere et ensartet kødlag, men også at være mere tidskrævende i processen. Værktøjet har både vist potentiale ved pilottest ved at efterlade et passende kødlag men også udfordringer med integration på en pacelinje. Udfordringerne ligger i vægt, manøvredygtighed, ergonomi og pladsforhold, som alle er væsentlige parametre. |
Projektet afsluttes uden at være nået i mål, men har inspireret til en definition af følgende fremtidige projekt ”En automatisk midterstykke-multidelings celle”, som kan levere samtlige udskæringer fra et midterstykke. Med dette koncept bliver det muligt at fastholde midterstykket i rygsøjlen, hvilket giver mulighed for at lade robotter udføre skæreoperationerne. En sådan celle vil passe ind i multifunktionskonceptet i forlængelse af 3-delingen af den halve gris. |
Projektstatus 3. kvartal 2020
Det vigtigste nye output er, at projektet har udviklet en gribermekanisme, som solidt kan gribe, fastholde og løfte hele midterstykker på op til 20 kg. For at denne griber kan komme til anvendelse, er det et krav, at ribbensenderne ved rygafsavning blotlægges. Ved at gentage analyse- og idéproces for at præparere og blotlægge ribbensender har projektgruppen konstateret en væsentlig risiko, som består i adskillelse af ryg-knoglerester og ribben. Processen er meget vanskelig at udføre automatisk og tidskrævende for en manuel operatør. I forbindelse med usikkerhed om fremgangsmåden er det besluttet at undersøge muligheder for at foretage benplade-afskæring fra brystsiden, selv om det fra starten var fravalgt på grund af væsentligt blødere struktur på ribbenene. Baggrunden for projektets fokusering på gribning og fastholdelse er bundet i målsætningen om at kunne kontrollere kødlagstykkelsen på kambensdelen af ribbenspladen. Det er af største vigtighed, at et målesystem kan registrere position og geometri af de vigtige områder af benpladen, for at vi maskinelt og automatisk bliver i stand til at udføre processen. |
Den næste store aktivitet i arbejdspakken er at afprøve princippet for frigørelse af ryg-knoglerester fra ribben. Hertil er udviklet en mekanisme, som er tænkt til at kunne frigøre ryg og ribben i et væsentlig højere tempo, end det kan gøres manuelt. Parallelt hermed vil vi afprøve metodeidéer for at gribe fat i benpladen fra brystsiden og derved kunne afskære denne fra bryst mod ryg. Det vil give mulighed for at vride benpladen opad og give adgang til nem og forholdsvis hurtig manuel frigørelse af ryg og ribben. Efterfølgende vil der blive lagt vægt på selve processen med styring af kødlag på kambenene. |
Projektstatus 2. kvartal 2020
Det vigtigste nye output er, at graden af automatisering er endeligt fastlagt og metodemodel for en gribermekanisme, som viser gode takter, er under afprøvning,. En væsentlig parameter ved udformning af den mekaniske griber er de anatomiske forskelligheder ved midterstykkerne. Denne problematik bliver håndteret ved at definere en klassificering af midterstykkerne ud fra længde, bredde, krumning og bentykkelse. |
| Den næste store aktivitet i arbejdspakken er, at færdiggøre gribermekanisme og kortlægge metoder og principper/strategier for friskæring af benpladen med variabelt kødlag. Den største udfordring er fortsat, at definere de skærende bevægelser til robotten, så der skæres præcist så tæt på benene, at det ønskede lag kød efterlades. |
Projektstatus 1. kvartal 2020
Der er planlagt opstart i dette projekt i uge 16 2020, hvorfor der endnu ikke findes information til denne status. |