
Monofunktionsrobotter
AP 1 - Forbedret arbejdsmiljø ved ophængning af skinker
Formål
Projektet har til formål at udvikle ny produktionsteknologi, der kan automatisere enkeltfunktioner på de eksisterende linjer i den danske svinesektor, som i dag er manuelle. Dette sker gennem systematisk anvendelse af den nyeste robotteknologi og intelligent styringsteknologi. Arbejdspakken AP1 tager sit udgangspunkt i sektorens udfordringer med muskel- og skeletbesvær (MSB), som i særlig grad er aktuelt i forbindelse med ophængning og nedtagning af skinker på/fra juletræer.
Projektstatus 4. kvartal 2020
Det vigtigste nye output er, at der er identificeret partnere, der vil kunne modne og tilpasse udstyret og på sigt producere og udbrede den udviklede teknologi til alle interesserede slagterier. Efter prototypeforløbet vil en kommerciel partner kunne producere og udbrede den udviklede teknologi til alle slagterier. |
Projektet er afsluttet i SAF-regi. Fremadrettet skal det produktionsmodnede produktionsudstyr afprøves og godkendes til installation på slagteriet i 2. kvartal 2021. Efterfølgende vil konceptet og teknologien med fordel kunne udbredes til mange andre delstykker, hvor der anvendes krogbaseret transport og mellemlagrings-udstyr. |
Projektstatus 3. kvartal 2020
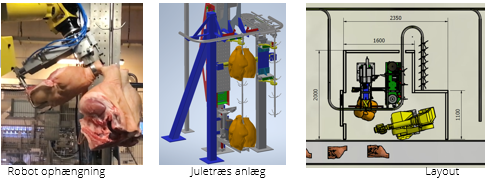
Det vigtigste nye output er, at prototypefasen er godt i gang med et samarbejde mellem et værtsslagteri, en kommerciel partner og DMRI. I udviklingsarbejdet af prototype-anlægget lægges der vægt på høj oppetid, hygiejneforhold og generiske installationsforhold. Den automatiske skinke-gribefunktion og vinkeljustering af gribeanordning foregår via et intelligent visionsystem, som er oplært via billedopsamling, der efterfølgende er behandlet af specialudviklede dataalgoritmer. Gribeanordningen er udført, så den med sikkerhed kan håndtere de forskelligartede skinker og placere dem inden for specificeret tolerance på de enkelte juletræskroge* uden at beskadige overfladen af sværen. Automatisk håndtering samt positionering af juletræerne er af nødvendighed for at automatisere denne disciplin, og derfor har projektet udviklet og afprøvet metoder, der kan håndtere de mere eller mindre deforme juletræer. Dette er afsluttet med en animeret 3D simuleret funktionsmodel. * (et mellemlager samt transportudstyr, som består af en stålstang med 20 kroge, ophængt under loftet på et glidestangssystem). |
Den næste store aktivitet er, at funktionsmodellen og principperne bliver videreudviklet kommercielt og planlægges installeret på slagteriet i starten af 2021. |
Projektstatus 2. kvartal 2020
Det vigtigste nye output er, at en fysisk funktionsmodel for ophængning er opbygget og afprøvet med gode resultater. Det samme gælder en CAD animeret konstruktion til indfødning og håndtering af juletræer. Denne konstruktion danner grundlag for en sikker og simpel metode til at håndtere de varierede geometrier på juletræerne. Griberposition og vinkling af griber foregår via et visionsystem, som er oplært via billedopsamling, der efterfølgende er behandlet af dataalgoritmer. Et layout forslag sandsynliggør muligheden for at indpasse en robotcelle på et mindre areal. Dette, sammen med juletræsanlægget, anskueliggør, at en lavere loftshøjde ikke er en hindring for at automatisere, så løsningen vil kunne finde anvendelse i hele end danske slagterindustri. Porteføljestyregruppen har accepteret faseovergang til prototype hvilket i praksis betyder, at SAF arbejdspakken afsluttes og arbejdet med produkt-modning og implementering fortsætter i kommercielt regi. |
Arbejdspakken afsluttes med en demonstration, dokumentation af resultaterne og afsluttende rapportering. |
Projektstatus 1. kvartal 2020
Teamets resultater er udvikling af et visionsystem for robotopsamling af skinker og idé/konstruktionsarbejde for automatisk håndtering af indførelse af tomme juletræer. I forlængelse af aktiviteterne i 2019, er der arbejdet på at integrere visionstyring, så robotten positionerer sin griber automatisk over den aktuelle skinke. Skinkerne kommer kørende på et transportbånd i tilfældige positioner, hvor et visionskamera optager et billede af hver skinkes omrids, som efter en billedbehandling giver information til robotstyringen ift. at opsamle skinken. Denne aktivitet er tæt på at være færdigudviklet på nuværende tidspunkt. Mekaniske aktiviteter er fokuseret på at udtænke et automatisk håndteringssystem til at bringe et tomt ophængningsjuletræ ind i en automatisk robotcelle. I denne proces skal der være mulighed for at udføre en geometrisk inspektion af hvert juletræ og dets 20 kroges positioner. Samtidigt skal der være et magasin af tomme juletræer, så den færdige robotcelle kan producere i minimum 30 minutter uden menneskelig indgriben. Resultatet af projektet skal være en demonstration af en funktion i en pilot robotcelle, hvor tomme juletræer bringes ind, og robotten opsamler skinker fra transportbåndet, hvor de ligger i vilkårlige positioner. Når der er ophængt 20 skinker, udtages det fyldte juletræ fra cellen. Inden det næste tomme juletræ overføres til ophængningsposition, skal der være mulighed for geometrisk inspektion via et sensorsystem, som kan være et 3D visionsystem. |