
Mobile robotter - AP1 Intuitiv programmering af Lille Hjælper
Vælg side
2022
Formålet er at gøre brugen og optimeringen af robotter tilgængelig for en bred gruppe af medarbejdere uden robotteknisk baggrund og derved styrke værdiskabelsen.
AP1 Intuitiv programmering af den lille hjælper
Projektstatus 4. kvartal 2022
Det vigtigste nye output er, at implementeringen af software-brugerflade og robotstyring til platformen er afsluttet, herunder softwarepipelinen til integration af casen med opsamling af marinerede spoleben fra kasse. Den endelige implementering giver en generisk platform, der muliggør hurtig udvikling og integration af nye simple opgaver og markerer afslutningen på udviklingsarbejdet. Slutrapporten er ligeledes færdiggjort og beskriver brugerfladen, platformen samt casen med marinerede spoleben og dokumenterer samlet set platformens tilgængelighed for en bred gruppe af medarbejdere uden robotteknisk baggrund. Slutrapporten beskriver desuden det afsluttende forsøgsarbejde, som validerer platformens funktionalitet som helhed. Der indgik 147 stykker spoleben i forsøget, som demonstrerede en generel succesrate på 85%, hvor den primære fejlkilde var tilskrevet griberen for enden af robotarmen. Med en revideret udgave af griberen forventes en succesrate på 93%. |
| Den næste store aktivitet i projektet er at offentliggøre resultaterne fra projektet på Teknologisk Instituts hjemmeside |
Projektstatus 3. kvartal 2022
Det vigtigste nye output er, at designet af brugerfladen er afsluttet, og funktionaliteten er valideret. Den mekaniske platform er færdiggjort og fremstår som en passende platform i produktionssammenhæng. Casen om spoleben er afsluttet, og en validering af det integrerede AI- og robotsystem er foretaget. Softwarepipelinen til implementering af brugerflade og robotstyring er under udvikling, hvilket giver en generisk platform, der muliggør hurtigere implementering af simple opgaver. Derudover blev de nødvendige materialer til dokumentation af udviklingsarbejdet i dette projekt indsamlet. Udarbejdelsen af den endelige rapport er påbegyndt. |
Den næste store aktivitet i projektet er at færdiggøre den generaliserede softwarepipeline. Den endelige rapport skal herefter være klar til offentliggørelse på projektets hjemmeside. |
Projektstatus 2. kvartal 2022
Det vigtigste nye output er, at projektet har udviklet og optimeret robottens gribeklo med hensyn til både materialevalg og udformning, så dens fejlrate er tæt på nul, og så materialerne kan holde til daglig vask. Selve robotplatformen er optimeret med henblik på at kunne placeres i en produktionssammenhæng ved en demonstration. Endelig er det intuitive brugerinterface udviklet på konceptbasis. Styregruppen besluttede imidlertid at lukke projektet, inden den endelige demonstration var gennemført, da gruppen vurderede, at det ikke giver mening at implementere den samlede løsning på nuværende tidspunkt. Den videre udvikling i projektet er således stoppet og i stedet fokuseres på at validere de eksisterende løsninger med henblik på anvendelse i andre projekter, herunder at levere slutdokumentationen. Projektet har leveret software, som væsentligt reducerer den tid, det tager at oplære en algoritme til at genkende produkter, som ligger tilfældigt i en kasse. På den mekaniske side er der udviklet gribeværktøjer, som kan håndtere komplekse former. |
Den næste store aktivitet i projektet er, at afslutte projektet og udfærdige en slutrapport, som offentliggøres på Instituttets hjemmeside. |
Projektstatus 1. kvartal 2022
Det vigtigste nye output er fokus på følgende fire områder: -Endelig udvælgelse af testcase. Her blev marinerede spoleben valgt, da det er en af de mest komplekse produktgrupper, der findes ift. identificering vha. visionsystemer, som p.t er den mest lovende teknologi til formålet -Optimering af gribekloen for bedre at kunne gribe omkring produktet -Optimering af robotplatformen med henblik på at kunne teste under produktionslignende forhold -Opbygning og udvikling af brugerinterfacet samt undersøgelse af brugervenligheden Den udviklede algoritme viste en driftsstabilitet på 95%, hvilket – i denne fase - er meget tilfredsstillende for en opgave af denne type. Der er opnået en kraftig forenkling af robot-opsætningen ved at minimere antallet af parametre, der skal indstilles. Dette arbejde har taget udgangspunkt i en analyse af, hvad der er nødvendigt for at etablere en drift, og hvad der relaterer sig til optimering. De funktioner, som operatøren skal opsætte, begrænses til de strengt nødvendige for at etablere drift. Herved forventes det, at projektet er kommet et stort skridt nærmere målet om, at det skulle være muligt og nemt for en trænet operatør at opsætte en arbejdsgang med robotten. |
Den næste store aktivitet i projektet er at færdigudvikle/optimere gribeklo, platform samt brugerinterface. Herefter opstartes en testrække, der skal dokumentere brugervenligheden af interfacet og fungere som demonstration af den samlede løsning for den lille hjælper. Målet er, at en operatør skal kunne lave en opsætning af en arbejdsgang på fabrikken på under fem minutter. Dette skal testes i 2022. |
2021
AP1 Intuitiv programmering af Lille Hjælper
Formålet er at gøre robotteknologien så let tilgængelig, at en slutbruger selv kan tilpasse Den lille hjælper (LH) til nye simple opgaver, så behovet for eksperthjælp og omkostninger til udvikling reduceres.
Målet med arbejdspakken er at udvikle et brugerinterface med stor fleksibilitet og brugervenlighed, så operatøren selv kan sætte LH op til at udføre nye simple opgaver, der aflaster vedkommendes arbejde.
Projektstatus 4. kvartal 2021
Det vigtigste nye output er, at projektet har gennemført en live-demonstration til Teknologisk Instituts fødevarekonference, hvor DMRI bl.a. var repræsenteret med løsninger indenfor automatisering af kødindustrien. Systemet er aftestet på marinerede spoleben, hvilket er en vanskelig opgave, da det er svært for et visionsystem at finde grænserne mellem de enkelte delstykker i en kasse. Den udviklede algoritme viste en driftsstabilitet på 95%, hvilket er meget tilfredsstillende for en opgave af denne type. Derudover har projektet arbejdet med at udvikle HMI’en (betjeningspanelet), og den er færdig som metodemodel. Målet er, at det skulle være muligt for en trænet operatør at opsætte en arbejdsgang med robotten. |
Den næste store aktivitet i projektet er, at projektet får en faseovergang til funktionsmodelfase. Dette vil betyde, at robotten kan komme ud i produktionsnær opsætning og blive prøvet under driftslignende betingelser, hvilket vil give udviklingsteamet brugerfeedback på selve brugervenligheden af systemet. Målet er, at en operatør kan lave en opsætning af en arbejdsgang på fabrikken på under fem minutter. Dette skal testes i 2022. |
Projektstatus 3. kvartal 2021
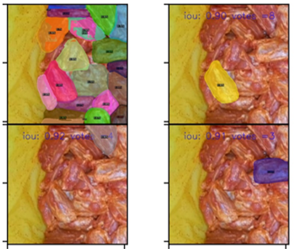
Det vigtigste nye output er, at projektet har succes med den systematiske dataindsamling og de efterfølgende behandlingsmetoder, således at det nu er muligt for algoritmen løbende at detektere og udvælge de bedst egnede produkter i et kar og dermed sikre en stabil og robust opsamling og overførsel af produkter til en ny position, eksempelvis en pakkemaskine. Arbejdet skal, udover at levere en konkret løsning, også munde ud i hurtigere og smartere integration af vision og styringsalgoritmer til mindre robot-visionapplikationer i andre projekter. Fotoet viser eksempler på algoritmens detektering og udvælgelse af de bedst egnede produkter i et kar. |
Den næste store aktivitet i projektet er at afprøve de første dataforsøg på en aktuel opgave. Denne opgave er udpeget af værtsslagteriet og handler om at lokalisere marinerede spoleben i et kar og give 3D koordinater til robotten. Herved bliver robotten i stand til at opsamle et spoleben og efterfølgende aflevere det på et frysetransportbånd. |
Projektstatus 2. kvartal 2021
Ifølge DMRI’s plan for afvikling af SAF projektporteføljen vil projektets aktiviteter først påbegyndes i andet halvår af 2021. |
Den næste store aktivitet i projektet bliver at udføre analyse-, idé- og metodefaserne. |
Artikel:
Grothe, NH. (2021) Slagteriets akademiske overbygning. Krogen februar
Projektstatus 1. kvartal 2021
Ifølge DMRI’s plan for afvikling af SAF projektporteføljen vil projektets aktiviteter først påbegyndes i andet halvår af 2021. |
Den næste store aktivitet i projektet bliver at udføre analyse-, idé- og metodefaserne. |