StaldTek - Rengøring - Løsning
Der er kun gjort få forsøg på at skabe en computer vision sensor, der giver feedback til robotten, omkring hvor rene stierne er. Disse metoder er dog begrænsede til offline spektralanalyser uden hensyn til strukturel information og den variable natur af omgivelserne. I en rigtig stald vil f.eks. lyset variere, damp vil fylde luften og siderne i grisestierne vil være misfarvede pga. gødningen.
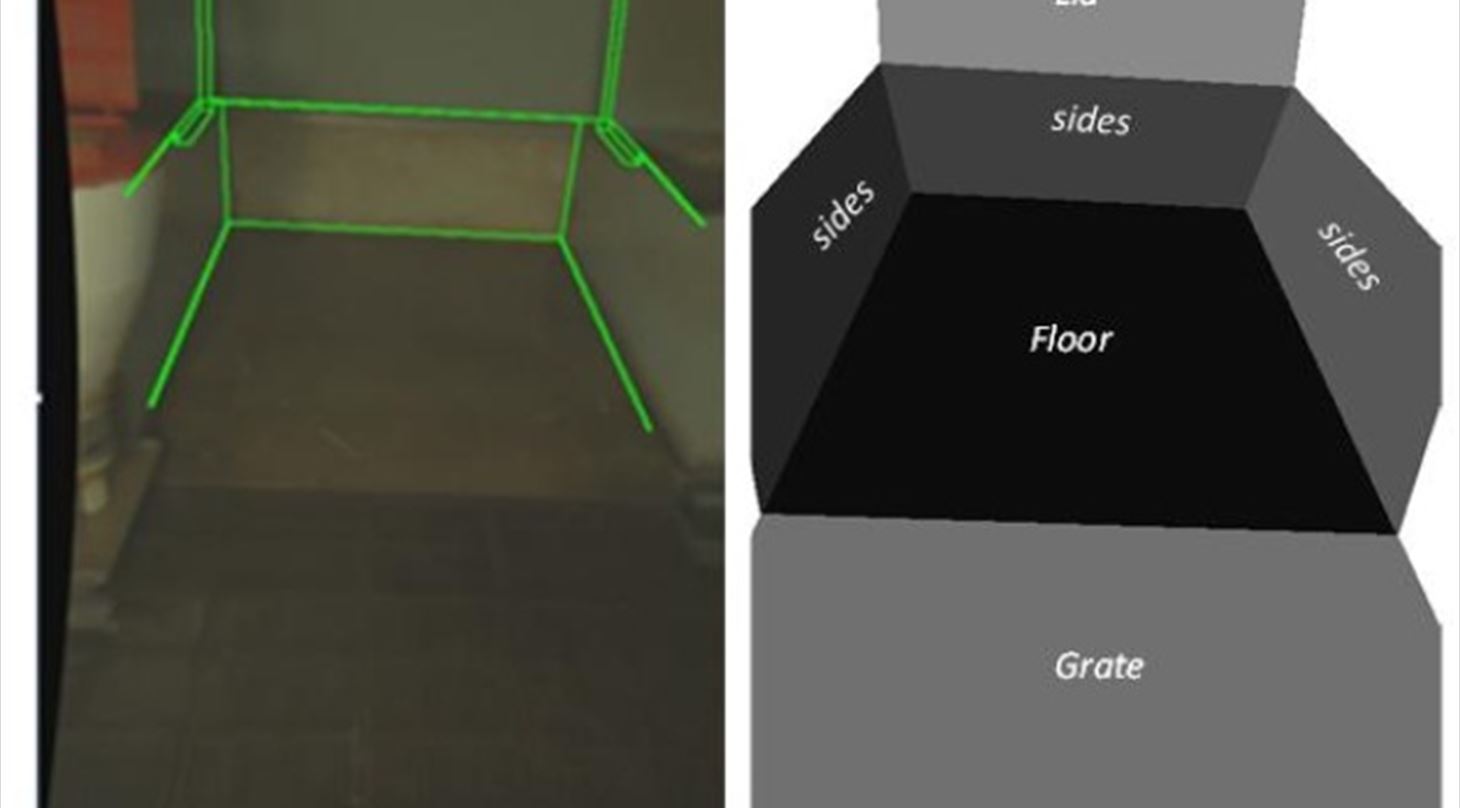
Vores metode anvender strukturel information til detektion af grisestier og segmentering. Samt en dynamisk farve tilgang til at give feedback på renseprocessen for at undgå forgæves at sprøjte vand på gødningfarvede overflader. Andersen (2005) designede en proces omkring en robot, der benyttede overfladehukommelse, men dette har andre implikationer. Istedet foreslår vi en algoritme, der kan benyttes lokalt og tilpasse sig selv til det visionsystemet ser foran sig, og dermed let kunne bruges i andre domæner.
Lyset i en stald er ikke ensformig og alle overflader har forskellige farveegenskaber. Robotten bruger derfor visionsystemet til at placere sig rigtigt foran grisestien. Baseret på modellen segmenterer den overfladerne (hvis anvendelig) og fokuserer rengøringen på et bestemt udvalgt område af gangen. Den rengør og sporer ændringer gentagne gange indtil der ikke længere registreres nogen ændringer baseret på parameteren vedholdenhed. For at undgå fejlklassificering pga. rindende vand og damp anvendes der en "vent" funktion, der bruger betingelser, som måler dynamikken i omgivelserne.
